Robin Hood Hashmap
24 Sep 2016



在 feed 上看到一篇文章 [1] 介绍了一种 Hashmap 的实现,称为 Robin Hood Hashmap。它也是一种基于开放定址(Open addressing)的哈希实现,但不同于以前被大家熟知的简单的线性探测(linear probing)或平方探测等等,它在发生冲突进行定址的时候,还维护了一种性质,据说可以使性能提升 20% 左右。出于好奇,我自己按照提出这一算法的原论文实现了一下,下面是实验过程和结果。
原理
为了理解 Robin Hood 的工作方式,首先要引用一个新概念,即 DIB(Distance to Initial Bucket)。DIB 故名思义指的是当前元素所在位置与它的初始位置之间的距离,这个初始位置就指的是经过 hash 运算后它的位置。
Robin Hood 的定址方式基于线性探测,但有一点不同,即它不是将新元素插到一个未被占用的地方,而是在线性探测的过程中,放在第一个 DIB 比它小的位置上去,而把原位置上的元素当做新元素继续依此规则向后查找,直到找到空位置为止。举个例子:
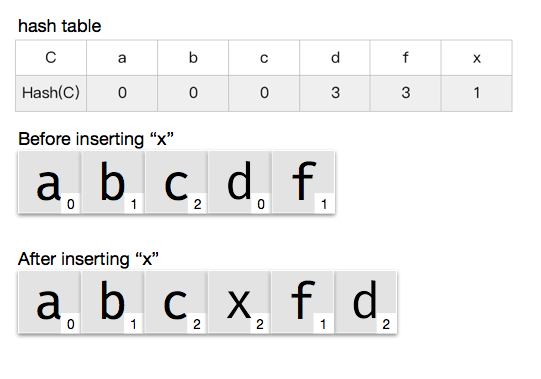
假设有如图的哈希函数,把六个字母按从左至右的顺序依次加到哈希表中。在加入前五个字母后,哈希表如上第二图所示。其中元素右下角的数字表示计算出的 DIB 值。当加入元素 x 时,有如下过程:
- 计算得
hash(x) = 1。 table[1]已经被占用,当前DIB(x) = 0,小于DIB(b) = 1。继续查找。table[2]已经被占用,当前DIB(x) = 1,小于DIB(c) = 2。继续查找。table[3]已经被占用,当前DIB(x) = 2,大于DIB(d) = 0。将 x 放入table[3]并且继续查找 d 的新位置。table[4]已经被占用,当前DIB(d) = 1,等于DIB(f) = 1。继续查找。table[5]为空,将 d 放入,结束。
查询
Robin Hood 的查询方式与插入对应。在哈希表中从初始哈希位置顺序查询即可。设当前位置为 p,查询的元素是 key,那么查询终止的条件就是 DIB(P) < DIB(key)。因为如果 DIB(P) < DIB(key) 成立的话,key 在插入时应该已经在这个位置上了。
删除
Robin Hood 有两种删除方式,按性质可以分为正常删除和懒惰删除。正常删除时,从被删除元素的位置向后查找,至到找到空位置或 DIB(P) = 0 的位置为止(不包含),将这一区间内的元素集体向左移动一个位置。这样的结果不但是要删除的元素被正常删除,且上述区间内的所有元素的 DIB 值都减少了 1。而懒惰删除则指的是给要删除的元素加一个标记,当再次插入新元素,而被删除的元素被置换出来的时候,不再继续置换,直接结束。
开始听下来感觉懒惰删除的表现可能更好一些,但其实正好相反 [2]。
测试
为了测试 Robin Hood Hashmap 的综合性能,我们需要考虑它在高负载(即空位置很少)的情况下的插入、删除和查询的性能。我们令 hashmap 的大小为 333331 。然后把一个有 350k 个单词的单词表按顺序将 330k 左右(占 hashmap 的 90%)个单词作为 key,随机单词作为 value 加入 hashmap 中。然后随机从单词表中选择 key,进行 2000 次删除操作。最后再随机从单词表中选择 key,进行 300k 次查询操作。注意,由于没有把所有单词都作为 key 加入到 hashmap 中,可以认为删除和查询操作会涉及到 hashmap 中不存在的 key,这也是我们特意要考量的一个点。
我用 Go 语言实现了一个 Robin Hood Hashmap。为了与之进行比较,还实现了一个普通的 Linear probing Hashmap。两者使用相同的哈希函数:
func hash(key string) (hashValue uint) {
hashValue = 5381
for _, c := range key {
hashValue = ((hashValue << 5) + hashValue) + uint(c)
}
return hashValue
}
在实现过程中,需要特别注意以下几个点:
- 先统一分配内存,而不是动态添加。
- 每个 bucket 不但记录 key 和 value,同时为了计算 DIB,还需要记录 hash value。我们令 hash value 的未初始化值为 0,取值为 \((0, tableSize]\)。这样只要看到 hash value 为 0 的 bucket,我们就可以确定它是未被占用的。具体做法是将 0 号 bucket 废除,下标从 1 开始计算。同时
hashValue = rawHashValue % tableSize + 1。 - 线性探测时,有可能出现探测的位置越界的情况,所以我们从一开始就要假设这是一个循环数组。在位置加减时,要特殊处理。
代码保存在 Github 上。
结果
在 Ubuntu 16.04,Golang 1.6 版本下测试结果:
➜ robinhood /usr/bin/time ./robinhood > out
7.05user 2.97system 0:09.03elapsed 110%CPU (0avgtext+0avgdata 48404maxresident)k
0inputs+19272outputs (0major+9894minor)pagefaults 0swaps
➜ robinhood /usr/bin/time ./linear > out
11.54user 3.10system 0:13.25elapsed 110%CPU (0avgtext+0avgdata 48624maxresident)k
0inputs+19272outputs (0major+9906minor)pagefaults 0swaps
➜ robinhood /usr/bin/time ./stdmap > out
3.75user 2.67system 0:05.75elapsed 111%CPU (0avgtext+0avgdata 59816maxresident)k
0inputs+19272outputs (0major+10906minor)pagefaults 0swaps
其中 linear 是线性探测的方法。而 stdmap 是使用 Go 标准库中的 map,因为 hash 函数不同,而且 Go 标准库的实现使用了大量 unsafe pointer 以增加效率,不可直接比较,所以仅作为参考。顺带一提,Golang 的 map 在指定大小时,指定的是 bucket 数,而它的一个 bucket 中是可以放 8 个 key, value pair 的,在确定负载时要注意[3]。
从结果来看,Robin Hood Hashmap 确实比 Linear probing 效率要高了 30% 左右。但是在有标准库的情况下,除了 interesting 之外,还有什么用呢 ╮( ̄▽ ̄)╭